





















1. Inleiding tot frequentieregelaars (variabele frequentieregelaars) Op het gebied van moderne industriële controle en......
LEES MEER
Thuis / Nieuws / Industrie nieuws / Industriële servomotor uitgelegd: typen, selectie en hoe u er het maximale uit kunt halen
Industriële servomotor uitgelegd: typen, selectie en hoe u er het maximale uit kunt halen
Hoe een industriële servomotor eigenlijk werkt
Een industriële servomotor is een motion control-actuator met gesloten lus, wat betekent dat hij niet alleen maar draait en er het beste van hoopt. Het bewaakt voortdurend zijn eigen positie, snelheid en koppel via een feedbackapparaat (meestal een encoder of solver), vergelijkt de werkelijke output met het opgedragen doel en corrigeert elke afwijking in realtime. Deze zelfcorrigerende lus scheidt een servosysteem van een standaard inductiemotor die met een vaste snelheid in open lus draait.
De kernlus werkt als volgt: een bewegingscontroller stuurt een positie- of snelheidscommando naar een servoaandrijving. De aandrijving zet dat commando om in elektrisch vermogen dat aan de motor wordt geleverd. De motor beweegt en de aan de motoras bevestigde encoder zendt positiegegevens terug – bij moderne industriële encoders doorgaans miljoenen pulsen per omwenteling. De drive vergelijkt binnenkomende encodergegevens met de opgedragen positie, berekent een foutsignaal en past het uitgangsvermogen aan om die fout te elimineren. Dit gebeurt duizenden keren per seconde. Het resultaat is een positioneringsnauwkeurigheid binnen ±0,01 graden en responstijden in het bereik van 1 tot 3 milliseconden in typische industriële toepassingen.
Het praktische gevolg van deze architectuur is dat een industrieel servomotoraandrijfsysteem de juiste positie behoudt, zelfs onder veranderende belastingsomstandigheden. Als een bewerkingsspil halverwege de snede weerstand ondervindt, compenseert het systeem dit automatisch, in plaats van stappen te verliezen of onvoorspelbaar te vertragen – wat precies is wat er gebeurt met alternatieven met open lus, zoals stappenmotoren die overbelast zijn.
Soorten industriële servomotoren: AC, DC en borstelloos
Industriële servomotoren vallen in drie belangrijke technologiecategorieën. Als u de verschillen begrijpt, kunt u het juiste motortype afstemmen op uw toepassingsvereisten voordat u ingaat op gedetailleerde specificaties.
AC-servomotoren
AC-servomotor s zijn het dominante type in de moderne industriële automatisering. Ze gebruiken wisselstroom en zijn vrijwel universeel borstelloos, wat betekent dat er geen borstelonderhoud nodig is, een langere levensduur en minder elektrische ruis. AC-servomotoren zijn verkrijgbaar in zowel synchrone als asynchrone ontwerpen. Synchrone AC-servomotoren – waarbij gebruik wordt gemaakt van permanente magneten in de rotor – zijn de standaard voor nauwkeurige bewegingscontrole in CNC-machines, verpakkingslijnen en robotassen. De rotor loopt synchroon met het roterende magnetische veld van de stator en zorgt voor extreem lage trillingen, een hoge koppeldichtheid en een uitzonderlijke positionele nauwkeurigheid. Asynchrone AC-servomotoren (inductietype) zijn minder nauwkeurig maar robuuster, toleranter voor zware omstandigheden en geschikt voor toepassingen zoals transportbanden, pompen en aandrijvingen met variabele snelheid waarbij absolute positionering niet vereist is.
DC-servomotoren
DC-servomotoren – met name geborstelde DC-ontwerpen – waren de industriestandaard voordat de AC-technologie volwassen werd. Ze bieden een zeer snelle respons, een uitstekend koppel bij lage snelheden en een eenvoudige bediening, maar de koolborstels moeten periodiek worden vervangen, beperken de maximale snelheden en genereren elektrische ruis die de gevoelige elektronica in de buurt kan verstoren. Geborstelde DC-servomotoren worden nog steeds gebruikt in retrofitsituaties, bepaalde laboratoriumapparatuur en toepassingen waarbij kosteneffectiviteit belangrijker is dan onderhoudsvrije werking. Moderne industriële installaties specificeren zelden nieuwe geborstelde DC-servomotoren, tenzij er een dwingende oude reden is.
Borstelloze DC (BLDC) servomotoren
Borstelloze DC-servomotoren combineren de snelheids- en koppelkarakteristieken van DC-motoren met de onderhoudsvrije werking van AC-borstelloze ontwerpen. Ze gebruiken permanentmagneetrotoren met elektronische commutatie; hall-effectsensoren of encoders vervangen het mechanische borstelcommutatorsysteem. BLDC-servomotoren leveren een hoog rendement, een hoge koppel-gewichtsverhouding en een lange levensduur, waardoor ze de voorkeurskeuze zijn in robotica, ruimtevaarttoepassingen, chirurgische apparatuur en compacte automatiseringssystemen waar ruimte en gewicht beperkt zijn. Voor industriële fabrieksautomatisering zijn BLDC- en synchrone AC-servomotoren qua prestaties grotendeels gelijkwaardig; het onderscheid daartussen op toepassingsniveau is aanzienlijk kleiner geworden.
Snelle vergelijking van typen industriële servomotoren
| Typ | Borstels | Koppeldichtheid | Precisie | Onderhoud | Typische toepassing |
|---|---|---|---|---|---|
| Synchrone wisselstroom | Nee | Hoog | Zeer hoog | Laag | CNC, robotica, verpakking |
| Asynchrone AC | Nee | Middelmatig | Middelmatig | Laag | Transportbanden, pompen, ventilatoren |
| Geborsteld gelijkstroom | Ja | Middelmatig–High | Hoog | Hoog (brush replacement) | Oudere systemen, laboratoriumapparatuur |
| Borstelloze gelijkstroom (BLDC) | Nee | Zeer hoog | Hoog | Zeer laag | Robotica, ruimtevaart, compacte automatisering |
Belangrijke specificaties om te evalueren bij het selecteren van een industriële servomotor
Datasheets van servomotoren bevatten veel cijfers, en het is gemakkelijk om je op de verkeerde te concentreren. Dit zijn de specificaties die feitelijk bepalen of een motor betrouwbaar zal presteren in uw toepassing.
Continu en piekkoppel
Continu koppel is het koppel dat de motor voor onbepaalde tijd kan volhouden zonder oververhitting – het getal dat de thermische prestaties op de lange termijn bepaalt. Het piekkoppel is doorgaans twee tot drie keer het continue koppel en vertegenwoordigt wat de motor kan leveren tijdens korte acceleratiestoten. Voor elke toepassing met cyclische beweging moet u de root mean square (RMS) koppelvraag over het gehele bewegingsprofiel berekenen en ervoor zorgen dat deze onder het continue koppel blijft. Het continu laten draaien van een industriële servomotor op of nabij het piekkoppel zal deze oververhitten en de levensduur van de wikkelingsisolatie verkorten. Als praktische regel geldt dat u een koppelmarge van minimaal 20-30% boven uw berekende RMS-behoefte moet hanteren.
Snelheidsbereik
Industriële servomotoren worden gekenmerkt door twee snelheidszones: het constante koppelgebied onder de basissnelheid, waar het volledige koppel beschikbaar is, en het veldverzwakkingsgebied boven de basissnelheid, waar het beschikbare koppel afneemt naarmate de snelheid toeneemt. Als uw toepassing tegelijkertijd een hoog koppel bij hoge snelheid vereist, controleer dan of de continue vermogenscurve van de motor (en niet alleen het maximale toerental) het vereiste bedrijfspunt dekt. Maximale snelheden voor industriële servomotoren variëren gewoonlijk van 2.000 tpm tot 6.000 tpm, waarbij sommige compacte hogesnelheidsontwerpen 8.000 tpm of meer bereiken.
Traagheid en traagheidsmatching
Traagheidsafstemming is een van de belangrijkste en meest over het hoofd geziene factoren bij de selectie van servomotoren. De traagheidsverhouding – de traagheid van de gereflecteerde belasting gedeeld door de traagheid van de motorrotor – bepaalt hoe goed de servolus de belasting kan regelen. Een ideale traagheidsverhouding voor toepassingen met hoge prestaties ligt tussen 1:1 en 3:1. Voor minder veeleisende toepassingen is maximaal 10:1 acceptabel. Boven de 10:1 domineert de belasting de systeemdynamiek, waardoor de servolus moeilijk af te stemmen is en traag, oscillerend of onstabiel gedrag ontstaat, ongeacht hoe capabel de schijf is. Als uw traagheidsverhouding te hoog is, is een planetaire versnellingsbak vaak de oplossing: een 5:1 versnellingsbak vermindert de gereflecteerde belastingtraagheid met een factor 25 (kwadraat van de overbrengingsverhouding), waardoor een slecht op elkaar afgestemde as kan worden omgezet in een goed gedragende as.
IP-classificatie en milieubescherming
Industriële servomotoren zijn verkrijgbaar in beschermingsgraden van IP54 (spatwaterbestendig) tot IP67 of IP69K (volledig afgedicht tegen stof en hogedrukwaterstralen). Voor voedselverwerking, farmaceutische productie, washdown-omgevingen of buiteninstallaties is de IP-classificatie een niet-onderhandelbare specificatie en geen secundaire overweging. De meeste standaard industriële servomotoren hebben IP65 als standaardclassificatie. Controleer specifiek de asafdichting, aangezien sommige motoren een asafdichting van lagere kwaliteit gebruiken, zelfs als het lichaam volledig afgedicht is.
Resolutie van feedbackapparaat
De encoderresolutie bepaalt hoe fijn de servolus de positie kan meten en corrigeren. Moderne industriële servomotoren gebruiken doorgaans encoders met resoluties tussen 17 bits (131.072 tellingen per omwenteling) en 24 bits (16,7 miljoen tellingen per omwenteling). Een encoder met een hogere resolutie verbetert de soepelheid bij lage snelheden, vermindert de snelheidsrimpels en maakt nauwere positielussen mogelijk, maar alleen als de drive de feedbacksnelheid kan verwerken en het mechanische systeem nauwkeurig genoeg is om hiervan te profiteren. Voor de meeste standaard CNC- en automatiseringstoepassingen is een 20-bit tot 23-bit absolute encoder voldoende. Voor ultraprecieze toepassingen – halfgeleiderapparatuur, metrologiesystemen, optische positionering – zijn een hogere resolutie en een zeer nauwkeurige encoder gerechtvaardigd.
Industriële servomotoraandrijvingen: het systeem is de motor
Een servomotor kan niet afzonderlijk van zijn aandrijving worden geëvalueerd. De motor en aandrijving vormen samen het servosysteem, en het afzonderlijk specificeren ervan zonder de compatibiliteit te verifiëren leidt tot integratieproblemen die na inbedrijfstelling duur zijn om op te lossen. Elke grote fabrikant van industriële servomotoren – Yaskawa, Fanuc, Siemens, Mitsubishi, Allen-Bradley (Rockwell), Panasonic en anderen – produceert op elkaar afgestemde motoraandrijvingsfamilies met bekende compatibiliteit en geoptimaliseerde auto-tuning-algoritmen. Het gebruik van een aandrijving van de ene fabrikant met een motor van een andere fabrikant is technisch mogelijk, maar vereist zorgvuldige aandacht voor de compatibiliteit van het feedbackprotocol, de bandbreedte van de huidige lus en de traagheidsmatchingsgegevens.
De belangrijkste aandrijfkenmerken die naast de motorspecificatie moeten worden geëvalueerd, zijn onder meer:
- Controlemodi: Positie-, snelheids- en koppelregelmodi dienen verschillende toepassingen. CNC-assen gebruiken de positiemodus; spindelaandrijvingen gebruiken vaak de snelheids- of koppelmodus. Controleer of de schijf de modus ondersteunt die vereist is door uw bewegingscontroller.
- Communicatie-interface: Moderne industriële servoaandrijvingen communiceren via EtherCAT, PROFINET, EtherNet/IP, MECHATROLINK of CANopen, afhankelijk van het automatiseringsplatform. Controleer de veldbuscompatibiliteit met uw PLC of bewegingscontroller voordat u een frequentieregelaarfamilie selecteert.
- Safe Torque Off (STO): STO is een veiligheidsfunctie (IEC 61800-5-2) die de stroom van de motor verwijdert in een veiligheidsgebeurtenis zonder dat een volledige contactor tussen de omvormer en de motor nodig is. De meeste huidige industriële servoaandrijvingen zijn standaard voorzien van STO. Bevestig dit als uw machine een noodstopcircuit van veiligheidscategorie 3 of hoger vereist.
- Automatische afstemmingsmogelijkheid: Hoogwaardige industriële servoaandrijvingen omvatten geautomatiseerde afstemmingsroutines die de mechanische belasting karakteriseren en de initiële PID-versterkingen instellen. Dit elimineert de noodzaak voor handmatige fijnafstelling in veeleisende toepassingen niet, maar verkort de inbedrijfstellingstijd aanzienlijk.
Encodertypen die worden gebruikt bij industriële servomotoren
De encoder is het sensorische systeem van de servolus. Het kiezen van het verkeerde encodertype voor de omgeving of toepassing is een van de meest voorkomende oorzaken van servosysteemproblemen in het veld.
Incrementele versus absolute encoders
Incrementele encoders geven een stroom pulsen af terwijl de as draait. De controller telt deze pulsen om de positie en snelheid te berekenen. De kritische beperking is dat positiegegevens verloren gaan bij stroomuitval, waardoor elke keer dat de machine opstart een homing-sequentie vereist is. Voor toepassingen waar homeing onpraktisch is – verticale assen die zouden kunnen vallen tijdens het homing, machines die 24/7 continu in bedrijf zijn, of assen waarbij de uitgangspositie niet gemakkelijk toegankelijk is – zijn incrementele encoders niet geschikt.
Absolute encoders bieden een unieke digitale code voor elke aspositie en behouden deze informatie zelfs na een stroomcyclus. Bij het opstarten is geen homing vereist. Absolute encoders met één draai volgen de positie binnen één omwenteling; absolute multi-turn encoders (die gebruik maken van getande telmechanismen of een geheugen met batterijvoeding) houden bovendien het totale aantal omwentelingen bij. Voor industriële toepassingen met verticale assen, portalen of machines waarbij opstarttijd en positioneringsveiligheid van cruciaal belang zijn, hebben absolute encoders ondanks hun hogere kosten sterk de voorkeur.
Optische versus magnetische encoders
Optische encoders gebruiken een lichtbron en een codeschijf met nauwkeurig geëtste patronen om positiesignalen te genereren. Ze bereiken zeer hoge resoluties (tot 24-bit of hoger) en uitstekende nauwkeurigheid, maar de optische schijf is kwetsbaar voor vervuiling door olie, koelvloeistof en fijne deeltjes. Optische encoders zijn geschikt voor schone omgevingen zoals de productie van halfgeleiders, precisieassemblage en medische apparatuur. Bij industriële bewerking, metaalbewerking of buitentoepassingen vereisen ze beschermende maatregelen of worden ze vervangen door magnetische alternatieven.
Magnetische encoders gebruiken gemagnetiseerde poolpatronen op een doelwiel en een sensor die de variatie in het magnetische veld detecteert terwijl de as draait. Ze bieden een lagere resolutie dan optische ontwerpen, maar zijn zeer goed bestand tegen vervuiling, vocht, schokken en trillingen – de omstandigheden die gebruikelijk zijn in zware industriële omgevingen. Moderne magnetische encoders met een resolutie van 17-bit tot 19-bit zijn geschikt voor de meeste industriële motion control-toepassingen waarbij de omgeving optische technologie uitsluit.
Het dimensioneren van een industriële servomotor: een praktische workflow
Het te klein maken van een servomotor veroorzaakt blokkeerfouten, thermische uitschakelingen en productieonderbrekingen. Overdimensionering verspilt kapitaal, vergroot de mismatch van de traagheid en kan ervoor zorgen dat de controlelus moeilijker af te stemmen is. Een systematische dimensioneringsworkflow vermijdt beide problemen.
- Stap 1 — Definieer het bewegingsprofiel: Stel de volledige bewegingscyclus vast: de afgelegde afstand per cyclus, de acceleratie- en deceleratietijden, de constante snelheidsperioden en de verblijftijd. Druk dit uit als een trapeziumvormig of S-curve snelheidsprofiel. Dit profiel vormt de basis voor alle koppel- en toerentalberekeningen.
- Stap 2 — Bereken de traagheid van de belasting: Tel de gereflecteerde traagheid op van elk roterend en translerend onderdeel op de motoras: de mechanische belasting, koppeling, versnellingsbak, kogelomloopspindel of riem en eventueel daaraan bevestigd gereedschap. Dit is de totale belastingtraagheid die de motor bij elke cyclus moet versnellen en vertragen.
- Stap 3 — Bereken de vereiste koppels: Bepaal het versnellingskoppel (J_totaal × hoekversnelling), het wrijvingskoppel (gemeten of geschat op basis van de aandrijflijn) en het zwaartekrachtkoppel (voor niet-horizontale assen). Tel deze op voor het piekkoppel tijdens acceleratie. Bereken het RMS-koppel over de volledige cyclus voor thermische dimensionering.
- Stap 4 — Controleer de traagheidsverhouding: Deel de totale belastingtraagheid door de rotortraagheid van de kandidaatmotor. Doel 3:1 of lager voor krachtige toepassingen; accepteer tot 10:1 voor gematigde dynamiek. Als de verhouding groter is dan 10:1, voeg dan een versnellingsbak toe, selecteer een motor met een hogere traagheid of verminder de belastingtraagheid aan de bron.
- Stap 5 — Controleer de snelheidseis: Bevestig dat het vereiste motortoerental (rekening houdend met eventuele overbrengingsverhoudingen) binnen het continue koppelgebied van de motor valt. Als tegelijkertijd een hoog toerental en een hoog koppel vereist zijn, controleer dan de continue vermogenscurve van de motor op dat bedrijfspunt.
- Stap 6 — Pas veiligheidsmarges toe: Selecteer de uiteindelijke motor met een marge van minimaal 20-30% op zowel het piekkoppel als het RMS-koppel. Belastingen in de praktijk overschrijden vaak de theoretische berekeningen als gevolg van wrijvingsvariatie, gereedschapsveranderingen en dynamische belastingsverstoringen.
PID-tuning voor industriële servomotorsystemen
Zelfs een servomotor van het juiste formaat met een goed afgestemde aandrijving zal slecht presteren als de regellus niet is afgestemd. PID-afstemming (Proportional-Integral-Derivative) past de drie regelversterkingen aan die bepalen hoe agressief de drive reageert op positiefouten, hoe deze steady-state offset elimineert en hoe oscillatie wordt gedempt.
Wat elke winst doet
Proportionele (Kp) winst bepaalt de onmiddellijke reactie op een positiefout – een hogere Kp betekent een snellere, agressievere correctie. Te hoog en het systeem oscilleert; te laag en reageert traag, met grote positiefouten onder belasting. Begin met het verhogen van Kp totdat de eerste tekenen van oscillatie verschijnen en verlaag vervolgens met ongeveer 20%.
Afgeleide (Kd) winst dempt oscillatie door te reageren op de snelheid waarmee de fout verandert, niet op de foutgrootte. Het toevoegen van Kd na het instellen van Kp maakt een hogere proportionele versterking mogelijk zonder instabiliteit. Zie het als de schokdemper van het besturingssysteem. Te veel Kd versterkt de ruis en veroorzaakt hoogfrequent gebabbel.
Integrale (Ki) winst accumuleert fouten in de loop van de tijd en elimineert de steady-state positie-offset die proportionele regeling alleen niet volledig kan corrigeren. Voeg Ki als laatste en in kleine stappen toe - te veel integrale versterking veroorzaakt een langzame, laagfrequente oscillatie die 'integrale opwinding' wordt genoemd.
Praktische afstemmingsbegeleiding
De meeste moderne industriële servoaandrijvingen bevatten automatische afstemmingsfuncties die de initiële winst instellen op basis van gemeten mechanische respons. Gebruik auto-tune als uitgangspunt, niet als eindresultaat. Controleer na het automatisch afstemmen de prestaties met het daadwerkelijke bewegingsprofiel van de productie – snelle cycli met volledige belasting – en niet alleen met een langzame testbeweging. Als het mechanische systeem compliantie heeft (een riemaandrijving, lange flexibele koppeling of meertraps versnellingsbak), kunnen notch-filters op de resonantiefrequentie van het mechanische systeem nodig zijn om oscillaties te onderdrukken die PID-afstemming alleen niet kan elimineren. Bode-plotanalyse, beschikbaar in geavanceerde softwarepakketten voor servoaandrijving, is de meest efficiënte manier om mechanische resonanties te identificeren en te onderdrukken.
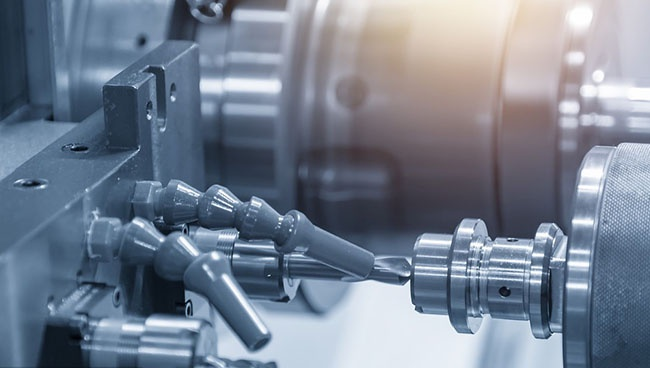
Industriële servomotortoepassingen per branche
Industriële servomotoren worden overal gebruikt waar beweging nauwkeurig, herhaalbaar en snel moet zijn. De volgende tabel geeft een overzicht van de meest voorkomende industriële toepassingen, de belangrijkste prestatie-eisen in elke toepassing en het typische gebruikte motortype.
| Industrie | Typische toepassing | Primaire vereiste | Gemeenschappelijk motortype |
|---|---|---|---|
| CNC-bewerking | Asaandrijvingen, spindels | Hoog positioning accuracy, rigid speed control | Synchrone wisselstroom servo |
| Robotica | Gezamenlijke actuatoren, eindeffectoren | Hoog torque density, low inertia, compact size | BLDC-servo, synchrone AC-servo |
| Verpakking | Pick-and-place, formulier-fill-seal, etikettering | Snelle cyclustijden, herhaalbare positionering | Synchrone wisselstroom servo |
| Halfgeleider / elektronica | Waferbehandeling, PCB-assemblage | Ultrahoge precisie, compatibiliteit met cleanrooms | Lineaire servo, AC-servo met hoge resolutie |
| Afdrukken / converteren | Baanspanningscontrole, registercontrole | Soepele snelheidsregeling, snelle onderdrukking van verstoringen | Synchrone wisselstroom servo |
| Medische apparatuur | Chirurgische robots, beeldvormingssystemen | Stille werking, nauwkeurige koppelregeling, compact | BLDC-servo |
| Metaal vormen | Persaandrijvingen, buigmachines | Hoog peak torque, position accuracy at low speed | Synchrone wisselstroom servo (high-torque frame) |
Onderhoud en probleemoplossing voor industriële servomotoren
Industriële servomotoren zijn ontworpen voor een lange levensduur – doorgaans ruim 20.000 uur in correct toegepaste en onderhouden systemen. De meeste storingen in het veld zijn het gevolg van een klein aantal identificeerbare oorzaken, en de meeste daarvan kunnen worden voorkomen door routinematig onderhoud.
De meest voorkomende faalmodi
- Oververhitting: De belangrijkste oorzaak van verslechtering van de wikkelingsisolatie en vroegtijdige motorstoring. Veroorzaakt door te kleine afmetingen, geblokkeerde koelopeningen, te hoge omgevingstemperatuur of herhaalde schendingen van de inschakelduur. Infrarood thermische beeldvorming tijdens normaal bedrijf is de snelste manier om motoren te identificeren die heter worden dan verwacht voordat er storingen optreden.
- Encoderfout: Vervuiling (stof, olie, koelvloeistof) op optische codeschijven veroorzaakt signaalfouten; mechanische schokken beschadigen encoderlagers; Degradatie van de kabel door herhaaldelijk buigen of EMI veroorzaakt intermitterende feedbackfouten. Symptomen zijn onder meer grillige bewegingen, volgfouten en positieafwijking. Controleer eerst de aarding van de kabelafscherming; slechte EMI-afscherming is de meest voorkomende oorzaak van encodersignaalproblemen in industriële omgevingen.
- Lagerslijtage: Dit manifesteert zich als trillingen, geluid en een verhoogd stroomverbruik. Veroorzaakt door hoge radiale of axiale belastingen die de belastingswaarden van de motoras overschrijden, verkeerde uitlijning of het binnendringen van vervuiling door een defecte asafdichting. Vervang lagers op de door de fabrikant aanbevolen intervallen of wanneer de trillingstrends een toenemend niveau laten zien.
- Positioneringsfouten: Als een servo-as opgedragen posities begint te missen of volgende foutfouten activeert, is de oorzaak meestal een encoderkalibratiedrift, problemen met de feedbackkabel of een verslechtering van de PID-versterking als gevolg van gewijzigde mechanische omstandigheden (versleten versnellingsbak, losse koppeling). Kalibreer de encoder opnieuw, inspecteer de feedbackbedrading en voer de autotune-functie van de frequentieregelaar opnieuw uit.
- Elektrische storingen: Isolatie kapot door binnendringend vocht, spanningspieken op de bus of aardlussen tussen de frequentieregelaar en de motor. Voer periodieke isolatieweerstandstests (Megger-tests) uit op de motorwikkelingen en controleer of de klemspanningsbeveiliging van de aandrijfbus binnen de specificaties ligt.
Controlelijst voor routineonderhoud
- Reinig koelribben en ventilatieopeningen maandelijks in stoffige omgevingen; elk kwartaal in schone omgevingen.
- Inspecteer de motorasafdichting en de encoderkabelconnectoren elke zes maanden op olie- of vochtverontreiniging.
- Controleer de uitlijning van de koppeling en het koppel van de bevestigingsmiddelen na mechanische werkzaamheden aan de aangedreven machine.
- Registreer het stroomverbruik en de motortemperatuur met regelmatige tussenpozen en de trend ervan in de loop van de tijd. Geleidelijke veranderingen duiden op het ontwikkelen van mechanische of elektrische problemen voordat deze ongeplande stilstand veroorzaken.
- Controleer jaarlijks de batterijspanning van multi-turn absolute encoders met batterijvoeding en vervang deze voordat de batterij onder de minimumdrempel zakt. Een lege encoderbatterij resulteert in verlies van de absolute positiereferentie en een thuisfout bij het opstarten.
- Voer jaarlijks isolatieweerstandstests uit op de motorwikkelingen om het binnendringen van vocht te detecteren voordat dit een wikkelingsstoring veroorzaakt.
Industriële servomotor versus stappenmotor: kiezen tussen beide
Voor motion control-toepassingen in het lage tot middelmatige koppelbereik met beperkte budgetten zijn stappenmotoren een gebruikelijk alternatief voor industriële servomotoren. Als u begrijpt waar elke technologie werkelijk de betere keuze is, voorkomt u zowel over-engineering als onderspecificatie.
Stappenmotoren werken met een open lus: ze bewegen in vaste stappen zonder positiefeedback. Ze zijn eenvoudiger, goedkoper en vereisen geen afstelling van de aandrijving. Ze zijn geschikt voor lichte belastingen, lage snelheden en toepassingen waarbij het af en toe missen van een stap acceptabel is of de belastingsomstandigheden voorspelbaar en consistent zijn. De beperkingen doen zich voor bij hogere snelheden (koppel daalt scherp boven een paar honderd toeren per minuut), onder variabele of schokbelastingen (stappen kunnen worden gemist zonder enige foutindicatie) en bij toepassingen met een hoge inschakelduur (thermisch beheer wordt moeilijk zonder feedback).
Industriële servomotorsystemen zijn de juiste keuze wanneer:
- Positioneringsnauwkeurigheid onder wisselende belastingen is verplicht: een servo corrigeert eventuele storingen; een stepper kan dat niet.
- De toepassing vereist werking bij hogere snelheden met volledig koppel; servomotoren behouden het nominale koppel over een breed snelheidsbereik.
- Het bewegingsprofiel omvat snelle acceleratie- en vertragingscycli; servo's gaan hier efficiënter mee om dankzij het regeneratieve remvermogen in moderne aandrijvingen.
- Een gemiste positie zou een kwaliteitsfout, een machinecrash of een veiligheidsgebeurtenis veroorzaken; het servosysteem zal een storing veroorzaken en een alarm geven; de stepper zal stilletjes zijn positie verliezen.
- De inschakelduur is hoog en continu: servomotoren met de juiste afmetingen werken koeler en efficiënter dan stappenmotoren bij een gelijkwaardig uitgangsvermogen.
Vorig bericht
Laagspanningsfrequentieregelaar: alles wat u moet weten voordat u er een koopt of installeert
Volgende bericht
Mens-machine-interface uitgelegd: wat het is en hoe u het goed kunt doen
Auteursrecht 2024 Fujian Raynen Technology Co., Ltd. Alle rechten voorbehouden.
Privacybeleid 